HELP_euler2DCM
Below is a demonstration of the features of the euler2DCM function
Contents
clear; close all; clc;
Syntax
[Q]=euler2DCM(a);
Description
This function uses the input Euler angle set a, a 1x3 vector, to compute a rotation tensor Q, also known as a direction cosine matrix (DCM). See also DCM2euler
Examples
Plot settings
fontSize=25;
Setting up rotation matrices based on angles.
Get example patch data
[F,V]=parasaurolophus;
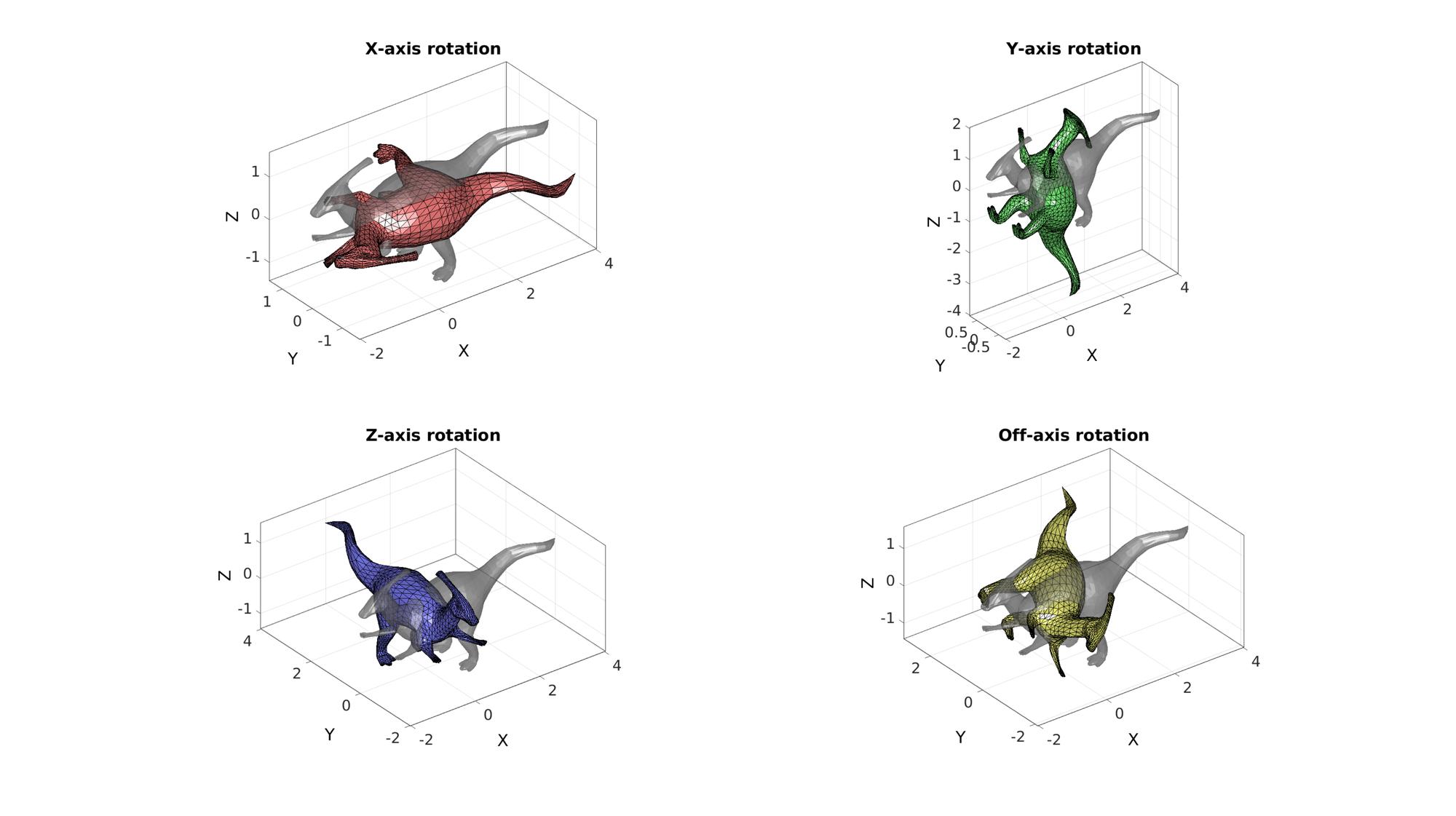
Defining sets of Euler angles for X, Y and Z axis rotation
E1=[0.5*pi 0 0]; %Just x E2=[0 0.5*pi 0]; %Just y E3=[0 0 0.5*pi]; %Just z E4=[0.25*pi 0.25*pi 0.25*pi]; %All
Use euler2DCM function to define the rotation matrices
[R1]=euler2DCM(E1); [R2]=euler2DCM(E2); [R3]=euler2DCM(E3); [R4]=euler2DCM(E4);
Rotate the coordinates. One may define the rotation in the form V*R or (R*V')' depending if pre-, or post-rotation is applied, whereby V*R=(R'*V')'.
V1=(R1*V')'; V2=(R2*V')'; V3=(R3*V')'; V4=(R4*V')';
Plotting data
hf=cFigure; subplot(2,2,1); title('X-axis rotation','FontSize',fontSize); gpatch(F,V,'kw','none',0.5); gpatch(F,V1,'rw'); axisGeom(gca,fontSize); camlight headlight; subplot(2,2,2); title('Y-axis rotation','FontSize',fontSize); gpatch(F,V,'kw','none',0.5); gpatch(F,V2,'gw'); axisGeom(gca,fontSize); camlight headlight; subplot(2,2,3); title('Z-axis rotation','FontSize',fontSize); gpatch(F,V,'kw','none',0.5); gpatch(F,V3,'bw'); axisGeom(gca,fontSize); camlight headlight; subplot(2,2,4); title('Off-axis rotation','FontSize',fontSize); gpatch(F,V,'kw','none',0.5); gpatch(F,V4,'yw'); axisGeom(gca,fontSize); camlight headlight; drawnow;
A second output can also be requested which is the inverse rotation matrix.
[Q,Qi]=euler2DCM([randn(1,3)*pi]); Q Qi
Q =
0.8566 -0.3911 -0.3366
0.3092 0.9113 -0.2720
0.4131 0.1289 0.9015
Qi =
0.8566 0.3092 0.4131
-0.3911 0.9113 0.1289
-0.3366 -0.2720 0.9015
i.e. such that the following :
Vr=(Q*V')'; %The rotated coordinates Vn=(Qi*Vr')'; %The normal coordinates after transforming back the rotated coordinates using inverse matrix
Note that the sum of squared differences for instance is nearly zero
D=sum((V(:)-Vn(:)).^2)
D = 8.5943e-29
Creating multiple rotation matrices
It is possible to define multiple rotation matrices at once by specifying a multi-row angle set
E=[0.25*pi 0 0; 0 0.5*pi 0]; %E.g. two angle sets are specified, 1 for each row
In this case the rotation matrices are stacked in the 3rd dimension
[Q]=euler2DCM(E)
Q(:,:,1) =
1.0000 0 0
0 0.7071 -0.7071
0 0.7071 0.7071
Q(:,:,2) =
0.0000 0 1.0000
0 1.0000 0
-1.0000 0 0.0000
Using symbolic angles
try syms a b c [Q1]=euler2DCM([a 0 0]) [Q2]=euler2DCM([0 b 0]) [Q3]=euler2DCM([0 0 c]) [Q4]=euler2DCM([a b c]) catch warning('Symbolic toolbox likely missing') end
Q1 = [ 1, 0, 0] [ 0, cos(a), -sin(a)] [ 0, sin(a), cos(a)] Q2 = [ cos(b), 0, sin(b)] [ 0, 1, 0] [ -sin(b), 0, cos(b)] Q3 = [ cos(c), -sin(c), 0] [ sin(c), cos(c), 0] [ 0, 0, 1] Q4 = [ cos(b)*cos(c), -cos(b)*sin(c), sin(b)] [ cos(a)*sin(c) + cos(c)*sin(a)*sin(b), cos(a)*cos(c) - sin(a)*sin(b)*sin(c), -cos(b)*sin(a)] [ sin(a)*sin(c) - cos(a)*cos(c)*sin(b), cos(c)*sin(a) + cos(a)*sin(b)*sin(c), cos(a)*cos(b)]

GIBBON www.gibboncode.org
Kevin Mattheus Moerman, [email protected]
GIBBON footer text
License: https://github.com/gibbonCode/GIBBON/blob/master/LICENSE
GIBBON: The Geometry and Image-based Bioengineering add-On. A toolbox for image segmentation, image-based modeling, meshing, and finite element analysis.
Copyright (C) 2019 Kevin Mattheus Moerman
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.